
아래 내용은 ‘케라스 창시자에게 배우는 딥러닝 (프랑소와 슐레 저, 박해선 옮김, 길벗 출판사)’ 을 공부한 뒤, 배운 내용을 제 언어로 정리.기록한 것 입니다.
합성곱 신경망
기본
합성곱 층과 풀링 층 교차해서 쌓는 게 합성곱 신경망 기본 구조다.

[이미지 출처: http://taewan.kim/post/cnn/]
완전 연결 층(Dense) 과 차이
완전 연결 층은 입력 이미지 전역패턴 학습하지만, 합성곱 층은 입력 이미지 지역 패턴 학습한다.
특징
- 평행이동 불변성: 평행이동 된 지역 패턴은 같은 패턴으로 인식한다. 이는 합성곱 신경망이 효율적으로 지역 패턴 학습하게 한다. 또, 인간 두뇌가 객체 인식하는 방법과 같다.
- 객체를 계층적 인식: 컨브넷은 객체를 계층적으로 인식한다. 각 위치 에지, 질감에서 시작해서 귀, 코, 눈 등 더 상위 개념을 순차.계층적으로 인식해간다. 두뇌가 객체 인식하는 방법과 같다.
합성곱 연산
합성곱 층은 입력 이미지 받아 합성곱 연산 수행하고, 결과 출력한다.
합성곱 연산은 입력 이미지 모든 위치에서 지역 패턴들 추출한다.
- 지역패턴에는 에지(Edge), 질감(Texture) 등 포함된다.
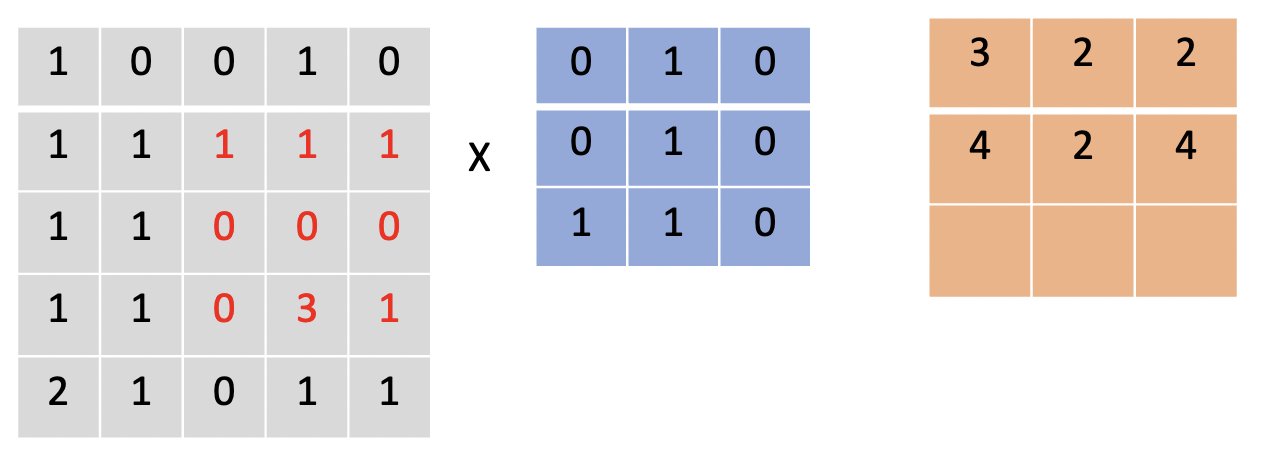
합성곱 연산 과정
- 입력 이미지 위를 3 $\times$ 3 또는 5 $\times$ 5 크기 윈도우가 슬라이딩(Sliding) 하며 3 $\times$ 3 또는 5 $\times$ 5 크기 패치(Patch:작은 조각) 추출한다. (윈도우 사이즈 크기 패치 추출한다)
- 각 패치와. 에지, 질감 등 지역 특징 담고있는 필터(또는 커널)를 요소별 텐서 곱 연산 한다.
- 텐서 곱 연산 결과 모두 합한다. 곧, 2 과정은 패치 각 요소를 가중합 한 것과 같다.
- 3 결과를 특성 맵(Feature Map) 또는 응답 맵(Responsse Map) 이라고 한다. 입력 이미지 각 위치에 그 필터 패턴이 나타나 있었는지 확인.응답한 결과다.
- 입력 이미지 각 채널(예: RGB 3개) 별로 각각 다른 필터 적용된다.
- 1개 합성곱 층에서 입력 이미지에 대해 여러 개 필터 적용한다(예: 32개, 64개, 128개…).
- 보통 1개 합성곱 층 필터 개수는 하위 층에서 상위 층 갈 수록 2 제곱 수로 점차 증가시켜 간다.
- 일반 경우, 합성곱 하위 층에서 상위 층(더 깊은 층) 갈 수록, 각 층의 출력 특성 맵 크기는 줄어든다.
위 과정 그림으로 그리면 아래와 같다.
입력 이미지와 필터

입력 이미지 위를 윈도우가 슬라이딩 하면서 패치 추출, 패치와 필터 합성곱








- 3개 채널 합성곱 결과 행렬을 요소별로 합 한게 필터 1개에 대한 최종 출력 특성 맵 이다.
- 이게 필터 수 만큼의 차원을 이룬다.
패딩(Padding)
Zero Padding
입력 특성 맵과 출력 특성 맵 크기를 같게 하고 싶으면 입력 특성 맵에 패딩(Padding) 추가하면 된다.
입력 특성 맵 가장자리에 적절한 개수 행과 열 추가하는 걸 패딩이라 한다.
패딩 자리에 보통 0 넣기 때문에, 제로 패딩 이라고도 한다.
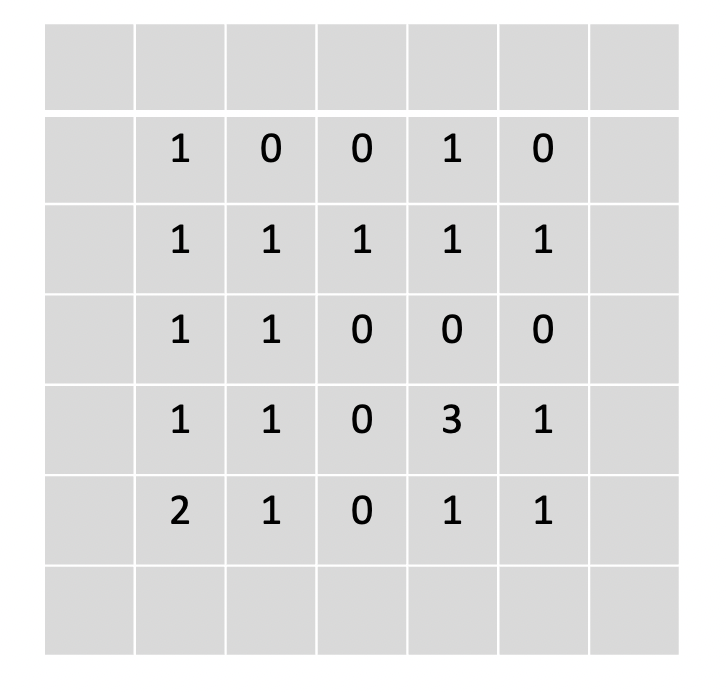
빈 부분이 패딩 자리다.
위 행렬에 대해 합성곱 하면 출력 특성 맵 크기가 입력 특성 맵과 같아진다 $(5*5)$
케라스에서 패딩 사용하기
- Conv2D 층에서 padding 파라미터 설정하면 된다. ‘valid’ 는 패딩 사용 안함, ‘same’은 패딩 사용함 이다.
- 기본 파라미터는 valid (패딩 사용 안함) 이다.
스트라이드(Stride)
보폭.
정의
연속한 두 윈도우 사이 거리를 스트라이드 라고 한다.
- 스트라이드 값 기본은 $1$ 이다.
예) 스트라이드 = 2 인 경우




출력 특성 맵 크기 $(4 \times 4)$ 가 입력 특성 맵 크기 $(5 \times 5)$ 보다 작아졌다(다운샘플링).
최대 풀링 연산
합성 곱 층 출력 특성맵 받아 다운샘플링 하는 연산이다.
$2*2$ 윈도우와 스트라이드 $2$ 사용해서, 패치 별로 최댓값만 추출한다.
- 평균 풀링 연산 사용할 수도 있다. 패치 영역 내 평균을 추출한다.
최대 풀링 연산 목적
- 입력을 다운샘플링 해서, 특성 맵 가중치 개수를 줄인다.
- 모델이 공간적 계층 구조 학습하는 걸 돕는다.
최대 풀링 연산 예시




간단한 컨브넷 만들기
MNIST 이미지 분류하는 간단한 컨브넷 만들기
from keras import layers
from keras import models
# 간단한 컨브넷 작성
# 이미지 특징 추출 층(합성곱 기반 층)
model = models.Sequential()
model.add(layers.Conv2D(32, (3,3), activation='relu', input_shape=(28, 28, 1))) # 필터 수, 패치 사이즈(3X3), 요소별 적용할 활성화 함수, 입력 특성 맵 사이즈
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Conv2D(64, (3,3), activation='relu')) # activation='relu': 음수, 0은 모두 0으로 만들고. 양수 값만 남긴다.
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Conv2D(64, (3,3), activation='relu'))
model.add(layers.Flatten()) # 특성공학 결과물 1차원 텐서(벡터)로 변환하는 층
# 완전 연결 분류기
model.add(layers.Dense(64, activation='relu'))
model.add(layers.Dense(10, activation='softmax')) # 출력층: 최상위층, 분류 결과물 확률 꼴로 변환.
# 모델 설계 결과 요약
model.summary()

- 합성곱 층과 최대 풀링 층 교차해서 쌓은. 전형적인 컨브넷 구조다.
- 합성곱 층 파라미터 별 의미: 입력 특성 맵에 적용할 필터 수(32), 윈도우 크기(3 $\times$ 3), 활성화 함수(렐루함수), 입력 특성 맵 크기.
- 최대 풀링 층 파라미터 의미: 윈도우 크기(2 $\times$ 2)
- Flatten() 층: 특성공학 결과를 1차원 텐서(벡터)로 변환하는 층. Dense 층에 넣기 위함이다.
MNIST 숫자 이미지 합성곱 신경망으로 분류
# MNIST 숫자 이미지 합성곱 신경망으로 분류
from keras.datasets import mnist
from tensorflow.keras.utils import to_categorical
(train_images, train_labels), (test_images, test_labels) = mnist.load_data()
train_images = train_images.reshape((60000, 28, 28, 1)) # 6만개 배치, 높이 28, 너비 28, 채널 1 사이즈로 크기 조정
train_images = train_images.astype('float32') / 255
test_images = test_images.reshape((10000, 28, 28, 1)) # 1만개 배치, 높이 28, 너비 28, 채널 1 사이즈로 크기 조정
test_images = test_images.astype('float32') / 255 # 전부 부동소수점 실수로 변환 + 1/255 로 스케일 조정
train_labels = to_categorical(train_labels) # train_label 들을 모두 원핫 인코딩 벡터로 변환 # 분류 결과와 크로스엔트로피 비교하기 위함
test_labels = to_categorical(test_labels)
# 모델 컴파일
model.compile(
optimizer = 'rmsprop',
loss = 'categorical_crossentropy',
metrics = ['accuracy']
)
# 모델 학습
model.fit(
train_images,
train_labels,
epochs = 5,
batch_size=64,
validation_data = (test_images, test_labels)
)
test_loss, test_acc = model.evaluate(test_images, test_labels) ; print(test_acc)
# 98% 정도 정확도 기록함.

간단한 컨브넷 밑바닥 부터 훈련시키기
개 vs 고양이 분류 컨브넷 정의
# 네트워크 구성
from keras import layers
from keras import models
model = models.Sequential()
model.add(layers.Conv2D(32, (3,3), activation='relu', input_shape=(150,150,3))) # 입력 특성 맵에 적용 할 필터 수: 32, 윈도우 사이즈, 활성화함수, 입력 데이터 규격: 150*150, RGB 3 채널
model.add(layers.MaxPooling2D((2,2))) # 최대 풀링 연산 적용할 윈도우 사이즈 - 다운샘플링(크기 축소)
model.add(layers.Conv2D(64, (3,3), activation='relu')) # 입력 특성 맵에 적용할 필터 수:64, 윈도우 사이즈, 활성화 함수
model.add(layers.MaxPooling2D((2,2))) # 윈도우 사이즈
model.add(layers.Conv2D(128, (3,3), activation='relu')) # 필터 수: 128개, 윈도우 사이즈
model.add(layers.MaxPooling2D((2,2))) # 윈도우 사이즈
model.add(layers.Conv2D(128, (3,3), activation='relu')) # 필터 수: 128개, 윈도우 사이즈
model.add(layers.MaxPooling2D(2,2)) # 윈도우 사이즈
# 여기까지 합성곱 기반 층(지역 패턴 추출 층)
# 여기서부터 완전 연결 층(전역 패턴 추출, 분류기)
model.add(layers.Flatten()) # 1차원 텐서(벡터)로 변환
model.add(layers.Dense(512, activation='relu')) # 512차원 벡터공간에 투영
model.add(layers.Dense(1, activation='sigmoid'))
model.summary()
# 1. 150*150 입력 이미지에서 3*3 윈도우 슬라이딩하면서 3*3 패치 추출 -> 32개 필터에 대해 합성곱 -> 148*148*32
# 2. 2*2 윈도우 1의 출력 특성 맵에 적용해서 패치 구역 별 최댓값만 추출 -> 출력 특성 맵 크기 절반으로 줄어든다 -> 74*74*32
# 3. 2의 출력 특성 맵에서 다시 3*3 패치 추출 -> 64개 필터에 대해 합성곱 -> 72*72*64
# 4. 2 처럼 최대 풀링 연산 3 출력에 적용 -> 출력 특성 맵 크기 절반으로 줄어든다 -> 36*36*64
# 5. 3*3 패치, 128개 필터에 대해 합성곱 -> 34*34*128
# 6. 최대 풀링 연산 적용 -> 17*17*128
# 7. 3*3 패치, 128개 필터에 대해 합성곱 -> 15*15*128
# 8. 최대 풀링 연산 적용 -> 7*7*128
# 9. 완전 연결 분류기 주입 위해 1차원 텐서(벡터)로 변환하는 층
# 10. 512차원 벡터공간에 투영
# 11. 1차원 벡터공간으로 차원축소 후 시그모이드 함수 적용

모델 컴파일
# 모델 컴파일
from keras import optimizers
model.compile(
loss = 'binary_crossentropy',
optimizer = optimizers.adam_v2.Adam(learning_rate=0.001),
metrics=['acc']
)
데이터 전처리
# 데이터 전처리
from keras.preprocessing.image import ImageDataGenerator
train_datagen = ImageDataGenerator(rescale=1./255) # 스케일 1/255 로 조정 , 부동소수점 형태로 변환
test_datagen = ImageDataGenerator(rescale=1./255) # 스케일 조정
train_generator = train_datagen.flow_from_directory(
'/Users/kibeomkim/Desktop/cats_and_dogs_small/train',
target_size=(150, 150), # 네트워크 입력 규격에 맞게 크기 변환
batch_size=20, # 1에폭 동안 투입 할 데이터 묶음
class_mode = 'binary' # 데이터가 이진 레이블임.
)
valid_generator = test_datagen.flow_from_directory(
'/Users/kibeomkim/Desktop/cats_and_dogs_small/test',
target_size=(150,150),
batch_size=20,
class_mode='binary'
)
# 모델 훈련
history = model.fit_generator(
train_generator,
steps_per_epoch= 100, # 20*100 = 총 훈련 데이터 갯수
epochs = 30 ,
validation_data = valid_generator,
validation_steps = 50
)
훈련 및 검증 정확도, 훈련 및 검증 손실 시각화
acc = history.history['acc']
val_acc = history.history['val_acc']
loss = history.history['loss']
val_loss = history.history['val_loss']
epochs = range(1, len(acc) + 1)
plt.figure(figsize=(10,5))
plt.subplot(1,2,1)
plt.plot(epochs, acc, 'bo', label='Training Accuracy')
plt.plot(epochs, val_acc, 'r', label='Validation Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.subplot(1,2,2)
plt.plot(epochs, loss, 'bo', label='Tranining Loss')
plt.plot(epochs, val_loss, 'r', label='Validation Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.suptitle('Accuracy & Loss')
plt.tight_layout()
plt.show()

과대적합 억제하는 가장 좋은 방법 = 훈련 데이터 수 늘리는 거다.
데이터 증식 사용해 과대적합 억제해보자.
# 데이터 증식
datagen = ImageDataGenerator(
rotation_range=30, # 회전을 몇 도 시킬 건가
width_shift_range=0.1, # 수평으로 평행이동 정도
height_shift_range=0.1, # 수직으로 평행이동 정도
shear_range=0.2, # y축 방향으로 각도 증가
zoom_range=0.5, # 확대/축소 범위
horizontal_flip=True, # 좌우 대칭시킨다
fill_mode='nearest'
)
# 데이터 증식 결과 시각화해서 살펴보기
from keras.preprocessing import image
fnames = sorted([os.path.join('/Users/kibeomkim/Desktop/cats_and_dogs_small/train/cats', fname) for fname in os.listdir('/Users/kibeomkim/Desktop/cats_and_dogs_small/train/cats')])
img_path = fnames[7]
img = image.load_img(img_path, target_size = (150,150)) # 이미지 읽어오기, 크기 150*150으로 변환
x = image.img_to_array(img) # (150,150,3) 크기 넘파이 배열(텐서)로 변환
x = x.reshape((1,)+x.shape) # (1,150,150,3) 으로 변환 (배치 차원 추가)
plt.figure(figsize=(5,5))
i = 1
for batch in datagen.flow(x, batch_size=1) :
plt.subplot(2,2,i) # i번째 이미지
imgplot = plt.imshow(image.array_to_img(batch[0]))
plt.xticks([])
plt.yticks([])
i += 1
if i == 5 : break
plt.tight_layout()
plt.show()

데이터 증식 적용하더라도, 애초에 훈련 데이터 수가 적기 때문에 과대적합 억제하는 데 충분치 않을 수 있다.
모델에 드롭아웃 추가해서 과대적합을 좀 더 억제해 보자.
# 드롭아웃 포함한 새로운 컨브넷 정의
from keras import models
from keras import layers
from keras import optimizers
model = models.Sequential()
# 합성곱 기반 층
model.add(layers.Conv2D(32, (3,3), activation='relu', input_shape=(150,150,3)))
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Conv2D(64, (3,3), activation='relu'))
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Conv2D(128, (3,3), activation='relu'))
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Conv2D(128, (3,3), activation='relu'))
model.add(layers.MaxPooling2D((2,2)))
model.add(layers.Flatten())
model.add(layers.Dropout(0.5))
# 완전 연결 분류기
model.add(layers.Dense(512, activation='relu'))
model.add(layers.Dense(1, activation='sigmoid'))
# 모델 컴파일
model.compile(
loss = 'binary_crossentropy',
metrics = ['acc'],
optimizer = optimizers.adam_v2.Adam(lr = 0.001)
)
# 데이터 증식 & 전처리
train_datagen = ImageDataGenerator(
rescale = 1./255,
rotation_range = 40,
width_shift_range= 0.1,
height_shift_range=0.1,
shear_range = 0.4,
zoom_range= 0.5,
horizontal_flip=True
)
test_datagen = ImageDataGenerator(
rescale=1./255
)
train_generator = train_datagen.flow_from_directory(
'/Users/kibeomkim/Desktop/cats_and_dogs_small/train',
target_size=(150,150),
batch_size= 20,
class_mode='binary'
)
valid_generator = test_datagen.flow_from_directory(
'/Users/kibeomkim/Desktop/cats_and_dogs_small/test',
target_size = (150,150),
batch_size=20,
class_mode = 'binary'
)
# 모델 훈련
history = model.fit_generator(
train_generator,
steps_per_epoch=100,
epochs = 100,
validation_data = valid_generator,
validation_steps = 50
)
model.save('/Users/kibeomkim/Desktop/models_saved/dog_and_cant.h5')
정확도 및 손실
acc = history.history['acc']
val_acc = history.history['val_acc']
loss = history.history['loss']
val_loss = history.history['val_loss']
epochs = range(1, len(acc) + 1)
plt.figure(figsize=(10,5))
plt.subplot(1,2,1)
plt.plot(epochs, acc, 'bo', label='Training Accuracy')
plt.plot(epochs, val_acc, 'r', label='Validation Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.subplot(1,2,2)
plt.plot(epochs, loss, 'bo', label='Tranining Loss')
plt.plot(epochs, val_loss, 'r', label='Validation Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.suptitle('Accuracy & Loss')
plt.tight_layout()
plt.show()

컨브넷 학습 시각화
활성화 시각화
합성곱 층 출력에 요소 별로 활성화 함수 적용한 결과를 ‘활성화’ 라고 한다.
이 활성화를 시각화 해서, 각 층의 의미 직접 눈으로 확인할 수 있다.
from keras.models import load_model
# 저장한 작은 컨브넷 로드
model2 = load_model('/Users/kibeomkim/Desktop/models_saved/dog_and_cant.h5')
model2.summary()
‘활성화’ 시각화
# 합성곱 층, 풀링 층 출력 시각화
# '활성화' 시각화
img_path = '/Users/kibeomkim/Desktop/cc.png'
from keras.preprocessing import image
img = image.load_img(img_path, target_size=(150,150))
img_tensor = image.img_to_array(img) # 텐서로 변환
img_tensor = np.expand_dims(img_tensor, axis=0) # 배치 축 추가
img_tensor /= 255. # 1/255로 스케일 조정
print(img_tensor.shape)
(1, 150, 150, 3)
# 원본 이미지 출력
plt.figure(figsize=(2,2))
plt.imshow(img_tensor[0])
plt.xticks([])
plt.yticks([])
plt.show()

[고양이 이미지 출처: https://www.rd.com/list/black-cat-breeds/]
# 상위 8개 레이어 출력만 추출
from keras import models
layer_outputs = [layer.output for layer in model2.layers[:8]] # 상위 8개 레이어 출력 추출
# 특정 입력에 대한 출력 매핑하는 모형
activation_model = models.Model(inputs=model2.input, outputs=layer_outputs)
# 하나 입력에 대해: 8개 출력 대응된다 (층 8개 출력 결과)
# 예측모드로 모델 실행하기
activations = activation_model.predict(img_tensor) # img_tensor 1개 입력에 대해: 8개 층 각각에 통과시켜서 그 출력 반환
첫번째 합성곱 층 12번째 필터의 활성화 맵 시각화
# 첫번째 합성곱 층 활성화 맵 시각화
first_layer_activation_result = activations[0]
print(first_layer_activation_result.shape) # 합성곱 결과: 높이 148, 너비 148, 배치 1, 필터 적용한 응답 맵 32개
# 응답 맵 32개 중 12번째 응답 맵 시각화
plt.figure(figsize=(2,2))
plt.matshow(first_layer_activation_result[0, :,:,21], cmap='viridis')
plt.xticks([])
plt.yticks([])
plt.show()

이 필터는 전체 에지를 감지하는 것 같다.
first_layer_activation_result = activations[0]
print(first_layer_activation_result.shape) # 합성곱 결과: 높이 148, 너비 148, 배치 1, 필터 적용한 응답 맵 32개
# 응답 맵 32개 중 2번째 활성화 맵
plt.figure(figsize=(2,2))
plt.matshow(first_layer_activation_result[0, :,:,2], cmap='viridis')
plt.xticks([])
plt.yticks([])
plt.show()

첫번째 층 두번째 필터는 도드라진 엣지 감지하는 것 같다.(고양이 귀 끝 부분)
네트워크 모든 활성화 시각화
# 네트워크 모든 활성화 시각화
layer_names = []
for layer in model2.layers[:8] : # 상위 8개 층 이름들 추출 (그림 이름으로 사용)
layer_names.append(layer.name)
print(layer_names)
[‘conv2d_13’, ‘max_pooling2d_11’, ‘conv2d_14’, ‘max_pooling2d_12’, ‘conv2d_15’, ‘max_pooling2d_13’, ‘conv2d_16’, ‘max_pooling2d_14’]
images_per_row = 16
for layer_name, layer_activation in zip(layer_names, activations) : # 층 - 활성화 매핑
n_features = layer_activation.shape[-1] # 활성화 마다 채널 수
size = layer_activation.shape[1] # 높이와 너비 어차피 같다.
n_cols = n_features // images_per_row
display_grid = np.zeros((size*n_cols, images_per_row*size))
for col in range(n_cols) :
for row in range(images_per_row) :
channel_image = layer_activation[0, :, :, col*images_per_row+row]
# 채널 이미지 스케일 조정
# 정규화
channel_image -= channel_image.mean()
channel_image /= channel_image.std()
channel_image*=64
channel_image += 128
channel_image = np.clip(channel_image, 0, 255).astype('uint8')
display_grid[col*size : (col+1)*size, row*size:(row+1)*size] = channel_image
scale = 1./size
plt.figure(figsize=(scale*display_grid.shape[1], scale*display_grid.shape[0]))
plt.title(layer_name)
plt.grid(False)
plt.imshow(display_grid, aspect='auto', cmap='viridis')
#plt.xticks([])
#plt.yticks([])
plt.show()








상위 층으로 갈 수록 활성화 맵 의미 시각적 파악 어려워진다.
상위 층 갈 수록, 모델이 학습한 몇 가지 ‘고양이라면 갖고 있을 만한 주요 특징들’만 남게 된다.
곧, 상위 층 각 필터는 ‘고양이의 특징’들이다.
모델은 입력 이미지 위를 슬라이딩 하면서 자신이 학습한 ‘고양이 특징’들이 입력 이미지에 나타나 있는지 확인한다.
위 마지막 이미지가 듬성듬성 빈 건, 입력 이미지가 모델이 학습한 고양이 특징들 중 일부를 안 갖고 있었다는 말이다. 곧, 필터에 응답 발생하지 않았다.
결과로 나온 활성화 맵 하나하나가 추상화 된 고차원적 의미 담게 된다. 예컨대 고양이 귀, 입, 눈 등이다.
CNN이 객체를 인식하는 방법은 인간 두뇌가 현실세계의 객체 인식하는 방법과 매우 유사하다.

[오른쪽 고양이 사진 출처: https://petdoc.co.kr/ency/280]
- 기억에 의존해 그린 고양이 얼굴 / 실제 고양이 사진
우리 인간은 객체를 주요 특징 몇 가지를 가지고 인식한다. 기억에 의존해 고양이 얼굴을 그릴 때 나는 머릿속으로 생각했다.
- 고양이는 뾰족한 귀가 있다.
- 고양이는 입, 코, 그리고 눈이 있다.
- 얼룩 고양이 였다.
- 고양이는 인중에 콧수염이 있다.
고양이에 대한 추상화 된 몇 가지 특징들만 가지고 ‘이것은 고양이다’라고 인식했다.
세부 디테일은 기억하지 않는다. 온전하게 기억할 수도 없다.
세부 디테일은 가지치기 하고 주요 특징 만을 기억하고. 객체 인식한다.